Radio Frequency Ranging for Wireless Sensor Network Localization
A thesis submitted in partial fulfilment for the degree of Doctor of Philosophy in the Faculty of Engineering and Applied Science and Department of Electronics and Computer Science
Intro
Wireless sensor networks (WSNs) have a diverse range of industrial, scientific and medical applications where the sensor nodes are of low cost, standard with respect to hardware architecture, processing abilities and communicate using low-power narrow-band radios. Position information of the sensing nodes within those applications is often a requirement in order to make use of the data recorded by the sensors themselves. On deployment, sensing nodes normally have no prior knowledge of their position and thus
a localization mechanism is often a requirement. The process of localizing a ’blind’ device consists of ranging estimates or angle measurements to a set of references with a prior knowledge of their position relative to a co-ordinate system and the position computation of the blind device in relation to the fixed references. This research focuses on the process of ranging to enable two-dimensional localization of sensing nodes within
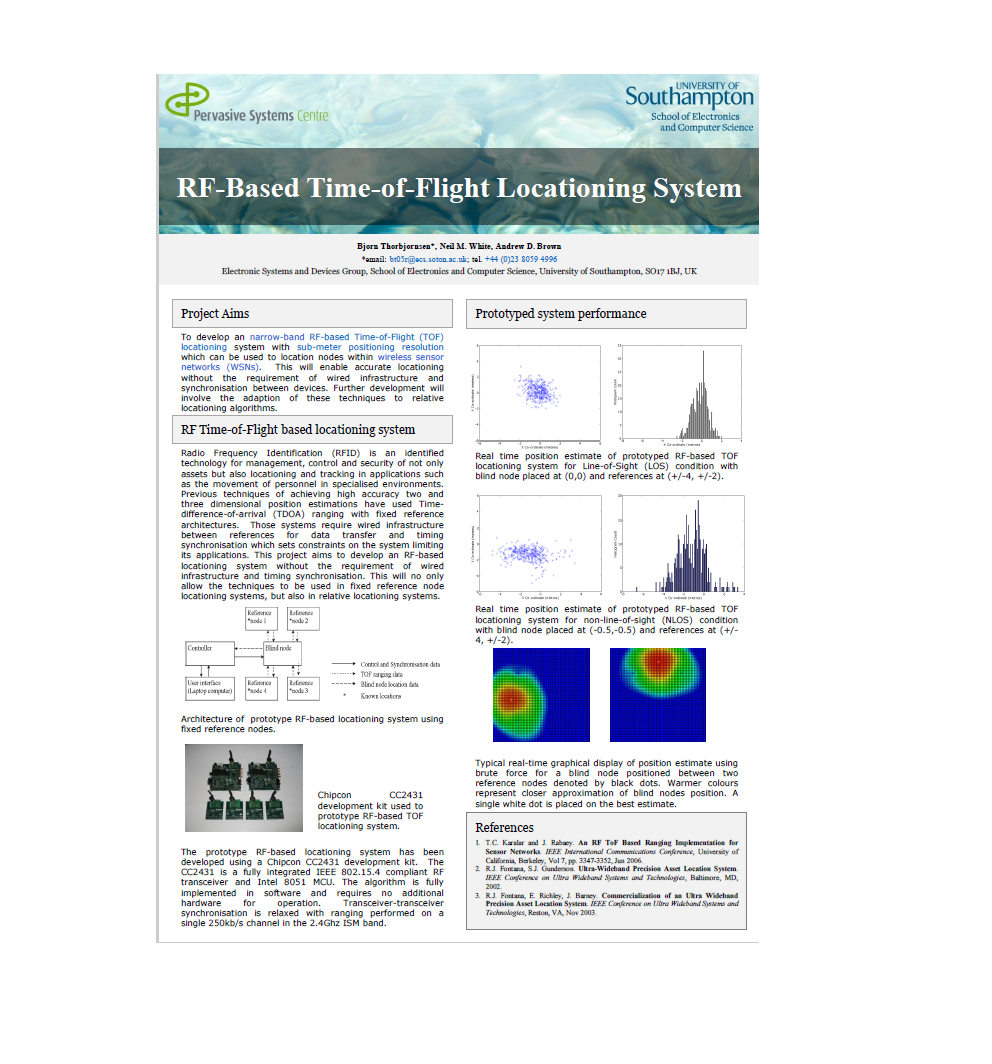
WSNs. Alternative ranging methods for the specified application field have not demonstrated their ability to meet the resolution and accuracy (resolution 0.3 m with accuracy better than ± 1.0 m line-of-sight) required. A novel radio frequency (RF) time-of-flight (TOF) ranging system is presented in this work to mitigate those problems. The system has been prototyped using a TI CC2431 development platform with ranging and data packet transfer performed on a single channel in the 2.4 GHz ISM frequency band.
The frequency difference between the two transceivers involved with ranging is used to obtain sub-clock TOF phase offset measurement in order to achieve high resolution TOF measurements. Performance results have been obtained for the line-of-sight (LOS), non-line-of-sight (NLOS) and indoor conditions. Accuracy is typically better than 7.0m RMS for the LOS condition over 250.0m and 15.8m RMS for the NLOS condition over 120.0m using a sample average of one-hundred two-way ranging transactions. Indoors accuracy is measured to 1.7m RMS using a 1000 sample average over 8.0m. Corresponding results are also presented for the algorithms suitability for localizing sensor nodes in two-dimensions. Ranging performance is bound by the signal-to-noise ratio (SNR), signal bandwidth, synchronization and frequency difference between devices. This ranging algorithm demonstrates a novel method where resolution and accuracy are improved
time dependent in comparison to frequency dependent methods using narrow-band RF.