Radio frequency (RF) time-of-flight ranging for wireless sensor networks
Abstract
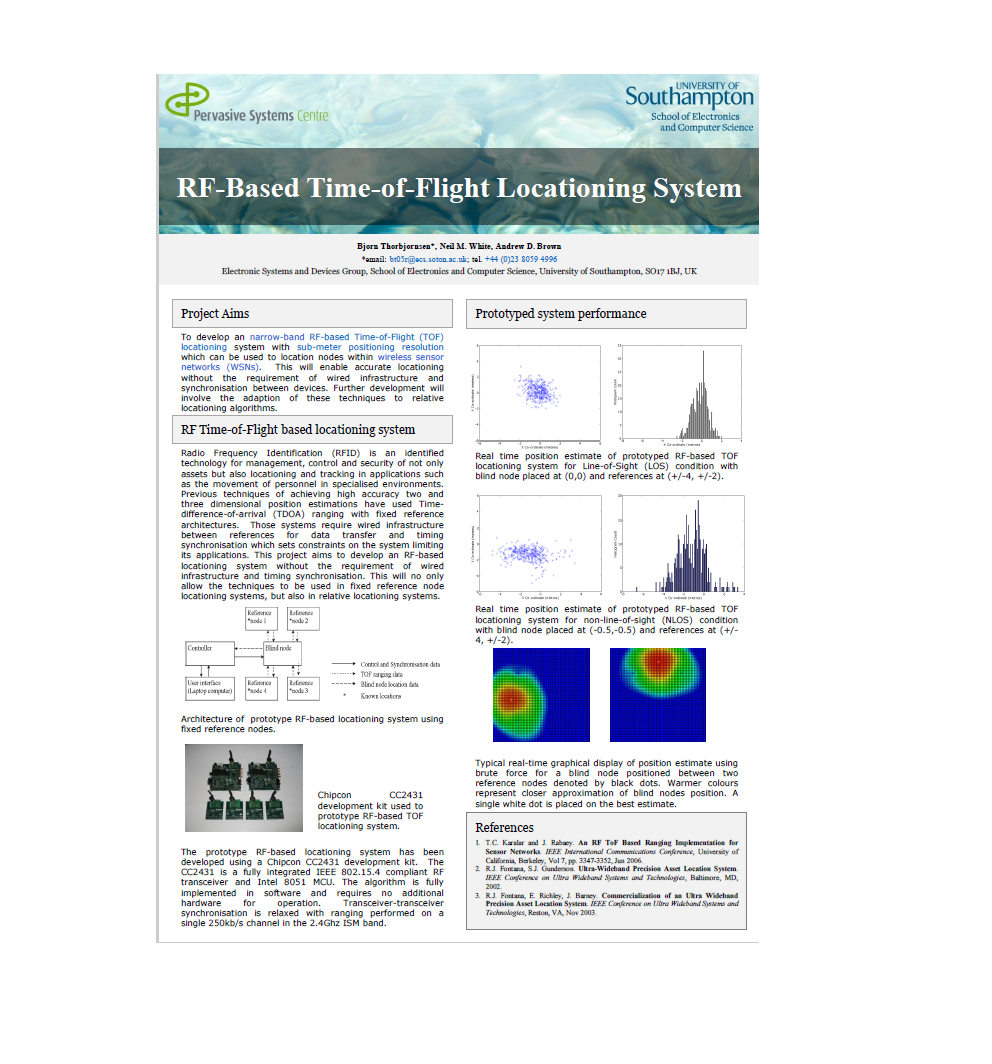
Position information of nodes within wireless sensor networks (WSNs) is often a requirement in order to make use of the data recorded by the sensors themselves. On deployment the nodes normally have no prior knowledge of their position and thus a locationing mechanism is required to determine their positions. In this paper, we describe a method to determine the point-to-point range between sensor nodes as part of the locationing process. A two-way time-of-flight (TOF) ranging scheme is presented using narrow-band RF. The frequency difference between the transceivers involved with the point-to-point measurement is used to
obtain a sub-clock TOF phase offset measurement in order to achieve high resolution TOF measurements. The ranging algorithm has been developed and prototyped on a TI CC2430 development kit with no additional hardware being required. Performance results have been obtained for the line-of-sight (LOS), non-line-of-sight (NLOS) and indoor conditions.
Accuracy is typically better than 7.0 m RMS for the LOS condition over 250.0 m and 15.8 m RMS for the NLOS condition over 120.0 m using a 100 sample average. Indoor accuracy is measured to 1.7 m RMS using a 1000 sample average over 8.0 m. Ranging error is linear and does not increase with the increased transmitter–receiver distance. Our TOA ranging scheme demonstrates a novel system where resolution and accuracy are time dependent in comparison with alternative frequency-dependent methods using narrow-band RF.
Introduction
The development of fully integrated, low-power, low-cost communications equipment over recent years have led to the development of wireless sensor networks (WSNs) for many monitoring, control and tracking applications [1–3]. Determining the position of sensor nodes within those networks is important in order to provide additional information to the quantity being measured. Sensor nodes are often deployed without a prior knowledge of their location and therefore a method to determine their absolute or relative position is required.
To locate ‘blind’ sensor nodes, a ranging or angle measurement is first made to a number of reference or ‘anchor’ nodes which have prior knowledge of their location with respect to a local or global coordinate system. An algorithm is then used to compute the position of the blind device in relation to the reference nodes. Thus, the process of locationing consists of two stages: (1) ranging or angle measurements;
(2) the computation of the position of the blind device. In this paper, we focus on the problem of accurately estimating the point-to-point distance between two sensor nodes involved with the localization process of a WSN. Computation of a blind device position will be considered in our following publication.